Speakers
The 2nd International Symposium on
Physical Artificial Intelligence and Robotics
Prof. Jonathan Rossiter
Head of the Soft Robotics group at Bristol Robotics Laboratory (BRL), University of Bristol, UK
Plenary

Asst. Prof. Supachai Vongbunyong
Director of Field Robotics (FIBO), KMUTT, Thailand
Plenary

Dr. Hamed Rajabi
Director of the Mechanical Intelligence (MI) Research Group, London South Bank University, UK
Plenary

Prof. Julien Serres
Institute of Movement Sciences, ISM UMR7287, Bio-Inspired Systems Lab, Aix-Marseille University, France
Plenary

Assoc. Prof. Daniel Crespy
Director of School of Molecular Science and Engineering (MSE),
VISTEC, Thailand
Keynote

Asst. Prof. Tulaya Limpiti
Department of Telecommunications Engineering,
KMITL, Thailand
Keynote

Dr. Chaicharn Akkawutvanich
BRAIN-Robotics Lab, IST,
VISTEC, Thailand
Keynote
Dr. Ali Khaheshi
Mechanical Intelligence (MI) Research Group,
London South Bank University, UK
Keynote

Dr. Richard Suphapol Diteesawat
Soft Robotics group at Bristol Robotics Laboratory (BRL),
University of Bristol, UK
Keynote

Dr. Shen Treratanakulchai
Department of Biomedical Engineering,
Mahidol University, Thailand
Keynote

Dr. Thanate Angsuwatanakul
Faculty of Biomedical Engineering,
Rangsit University, Thailand
Keynote

Dr. Pongtorn Kietdumrongwong
Director of BDMS Health Research Center,
BDMS, Thailand
Special talk

Assoc. Prof. Theerawit Wilaiprasitporn
BRAIN-Interfaces Lab, IST,
VISTEC, Thailand
Special talk

Asst. Prof. Supasorn Suwajanakorn
Vision & Learning Lab, IST,
VISTEC, Thailand
Special talk
Prof. Jonathan Rossiter
Head of the Soft Robotics group at Bristol Robotics Laboratory (BRL), University of Bristol, UK
Plenary
Title:
Active soft matter and artificial muscles – from edible robots to our cyborg future
Abstract:
Advances in smart materials and structures are driving the development of soft robotics and have the potential to address global challenges from environmental remediation to healthy independent living. Here we will explore new and emerging soft robotic technologies and our recent developments in active soft matter. We show how these could enable a new future of enhancement in the physical world, complimenting the growing capabilities of virtual and AI systems. New developments include electric field-driven morphing matter, liquid metal self-oscillating systems, edible robots and robotic food, and the soft exosuits under development as part of the EPSRC VIVO Hub in Enhanced Independent Living.
Biography:
Jonathan Rossiter is Professor of Robotic at the University of Bristol and Royal Academy of Engineering Chair in Emerging Technologies. He heads the SoftLab research group at Bristol Robotics Laboratory and is PI of of over £20m current funding, including the EPSRC emPOWER programme grant to develop implantable artificial muscles and the EPSRC VIVO Hub for Enhanced Independent Living. His research focuses broadly on soft robotics and extends from fundamental materials development through smart structures and mechanisms to complete soft-smart machines. He has published over 250 peer-reviewed articles in leading venues across materials science, soft robotics, human factors and bio-inspired systems.
Asst. Prof. Supachai Vongbunyong
Director of Field Robotics (FIBO),
KMUTT, Thailand
Plenary
Title:
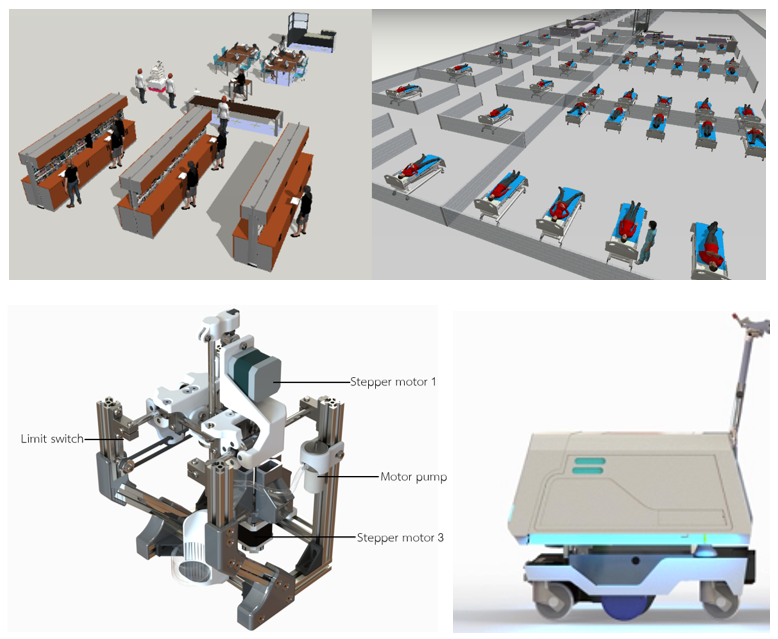
Technology Intervention in Hospital Pharmacy: Improving Inpatient Drug Dispensing Processes With Automation and Robotics
Abstract:
Hospital logistics systems coordinate the flow of materials and information that allow safe and efficient patient care, with pharmacy operations serving as a critical backbone. Persistent challenges such as medication errors and high staff workload continue to affect hospital pharmacies, highlighting the need for effective automation solutions. This study assesses the operational impact of integrating automatic unit-dose dispensing systems, autonomous mobile robots (AMRs), and personal medication dispensers (PMDs) in medium-sized hospital environments using discrete-event simulation (DES). Two automation-driven scenarios were evaluated against a conventional workflow. In the Centralized Automation scenario, medications are prepared as unit doses by an automated dispenser within the central pharmacy. In the Ward-level Automation scenario, medications are manually prepared as daily doses in the pharmacy and subsequently administered at the bedside using PMDs. The simulation results demonstrate that both approaches significantly reduce the workload of transcription staff, dispensing personnel, and pharmacists by approximately 10–17%. In addition to labor efficiency gains, the integrated automation strategies improved the consistency and safety of medication delivery processes. The study confirms that appropriately designed and integrated automation systems can deliver measurable operational improvements while maintaining high standards of care.
Keywords: Hospital logistics, Pharmcy dispensary, Autonomous mobile robot, Persersonal medicine dispenser
Biography:
Asst. Prof. Supachai Vongbunyong, PhD, is a Director of Institute of Field Robotics (FIBO), King Mongkut’s University of Technology Thonburi, Bangkok, Thailand. He is a founder a Hospital Automation Research Center (HAC@FIBO), co-founder of Famme Works Co., Ltd, and Innovation and Advanced Manufacturing Research Group. He received PhD in Manufacturing Engineering and Management from The University of New South Wales (UNSW), Australia, Master and Bachelor Degrees in Mechanical Engineering from Chulalongkorn University, Thailand. His research expertise is robotics and automation in industrial, medical, and healthcare applications. Some of this highlighted works are CARVER, autonomous mobile robots for hospital logistics. He published more than 50 academic articles in international journals and conference proceedings. In addition, he was awarded, “TMA Young Technologist Award 2021” (Runner-up), “KMUTT Rising Star Researcher Awards 2021”, and “Australia Alumni Innovation Award 2024”.
Dr. Hamed Rajabi
Director of the Mechanical Intelligence (MI) Research Group, London South Bank University, UK
Plenary
Title:
Mechanical Intelligence for the Future of Surgical Robotics: Bioinspired Multifunctionality from Insect Mandibles to Medical Tools
Abstract:
Nature builds systems that are remarkably adaptive, multifunctional, and efficient — not through complex sensing or control, but through the intelligence embedded in their structure. In this talk, I introduce Mechanical Intelligence (MI) as a nature-inspired design philosophy that enables engineered systems to achieve sophisticated behaviour through geometry and material architecture alone. Drawing on insights from insect biomechanics, I show how biological principles of passive adaptability and multifunctionality can be translated into novel surgical end-effectors for minimally invasive procedures. Inspired by the structure and performance of insect mandibles, our tools achieve multiple surgical manoeuvres through their design, reducing reliance on tool exchanges and simplifying procedural workflow. I conclude by highlighting how MI offers a pathway toward the next generation of medical robotics — systems that are simpler, safer, and inherently intelligent by design.
Biography:
Dr. Hamed Rajabi is an interdisciplinary researcher whose concept of Mechanical Intelligence (MI) is redefining how we design the next generation of adaptive, multifunctional technologies. Holding dual PhDs in Engineering and Biology, he combines deep biological insight with advanced mechanical analysis to uncover how natural systems embed intelligence directly into structure—and to translate these principles into engineering innovation.
He is the Founder and Director of the Mechanical Intelligence Research Group at London South Bank University, where his team develops bioinspired solutions spanning adaptive surgical tools, flapping-wing drones, and soft robotic systems. He has published more than 80 papers in leading journals including PNAS, Science Robotics, and Advanced Science, with many ranked among the top 5% of all research outputs globally.
Endorsed by the Royal Academy of Engineering as a Global Talent, Dr Rajabi and his team have secured major funding from the Royal Society, DAAD, and the Royal Academy of Engineering. His work is widely featured in international media and continues to shape the emerging field of bioinspired and mechanically intelligent robotics.
Prof. Julien Serres
Institute of Movement Sciences, ISM UMR7287, Bio-Inspired Systems Lab,
Aix-Marseille University, France
Plenary
Title:
From optical compass to polarimetric geolocation: a biorobotic approach
Abstract:
This research seeks to develop bio-inspired localization approaches to enhance the navigation of autonomous robots operating in urban and GNSS-denied environments. Conventional localization techniques rely on GPS, RTK, or 5G antenna systems, whose performance is highly dependent on environmental conditions, the availability of visible transmitters, and atmospheric factors such as cloud cover. In response to these limitations, emerging biomimetic strategies inspired by animal visual systems leverage underexplored mechanisms related to the perception of skylight polarization. The resulting polarization pattern of the sky constitutes a robust and reliable source of information for both orientation and positioning, mirroring the remarkable navigational capabilities of certain species that can return to their nests with high precision after journeys of several kilometers in insects and several hundred kilometers in migratory birds.
Biography:
Julien R. Serres was born in Aix-en-Provence, France, in 1978. He gained his master’s degree in Medical Imaging from Paris-Saclay University and a master’s degree in Electronics, Electrotechnics, and Automatic Control Engineering from Paris-Saclay University and the École Normale Supérieure Paris-Saclay, France, in 2003. Later that year, he joined the Biorobotics Lab, Marseille, France, as a Ph.D. student under the supervision of Dr. Nicolas Franceschini. He obtained his Ph.D. at the University of Montpellier, France, in July 2008. He has been a senior lecturer at Aix Marseille University since 2014, full professor since 2024, and is a member of the bio-inspired systems team at the Institute of Movement Sciences – Étienne-Jules Marey, France. He is the author of more than 100 publications and recipient of several best paper awards and honors (IEEE ECMR conference in 2017, Living Machines conference in 2018, The National Trophy IoT Industry & Services in 2019, The 7th International Bionic Award 2020, The 5th National Prize for Research in Provence in 2021, Medal of the Institut Universitaire de France in 2022). His research interests include bio-inspired robotics and bio-inspired visual localization techniques.
Dr. Chaicharn Akkawutvanich
BRAIN-Robotics Lab, IST,
VISTEC, Thailand
Keynote
Title:
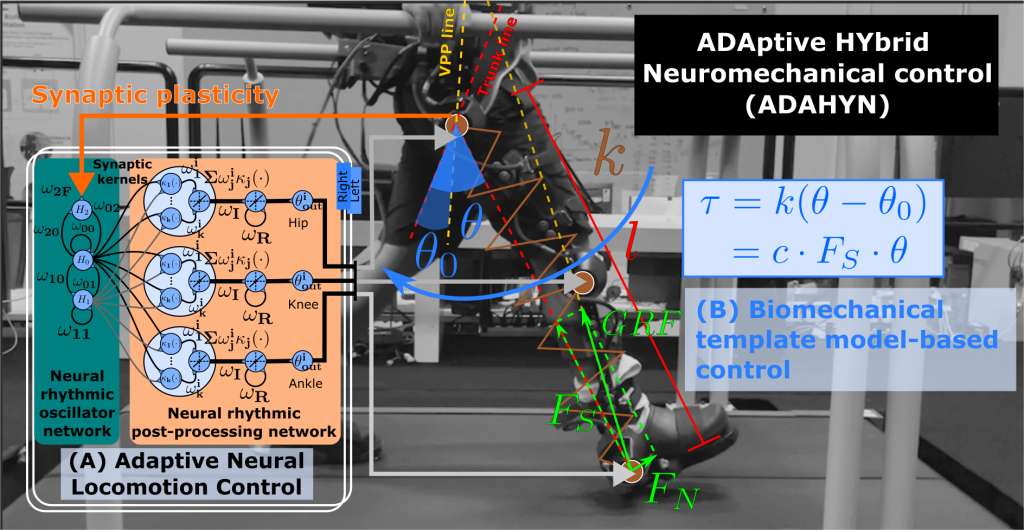
ADAptive HYbrid Neuromechanical (ADAHYN) Control for Adaptive Personalized Gait Assistance of a Lower-limb Exoskeleton
Abstract:
In this study, we propose an adaptive hybrid neuromechanical control to control an exoskeleton (ADAHYN). It fuses two bio-inspired approaches: 1) model-free adaptive neural locomotion control (ANLC) and 2) biomechanical template model-based control (BTBC). The adaptive neural control is composed of decoupled neural central pattern generators (CPGs) utilizing Hebbian-based synaptic plasticity and adaptive neural rhythmic post-processing networks utilizing radial basis function (RBF) with error-based learning. A learning from demonstration technique (LfD) is also deployed here for gait personalization. It facilitates a user or an expert to teach the network in a short learning time (less than two minutes) for individual intrinsic walking style in terms of frequency and pattern where the profiles are applied during the swing phase. While the adaptive neural control can provide gait personalization, the template control simultaneously offers leg compliance and posture balance for gait adaptation to environmental changes. It is based on force modulated compliant hip (FMCH) control and used for the hip compliance modulation during the stance phase. The hybrid control framework inherits robustness against external perturbation by design and can implicitly handle sensory feedback malfunction. Furthermore, it enables the exoskeleton’s adaptability to new environmental conditions, as demonstrated in walking experiments with treadmill speed changes and slope climbing.
Biography:
Mr. Chaicharn Akkawutvanich is currently a industiral postdoctoral research at Research center for Advanced Robotics and Intelligent Automation (ARIA), Vidyasirimedhi Institute of Science and Technology (VISTEC), Thailand. He also received his Ph.D. from School of Information Science and Technology (IST), VISTEC in 2023, focusing on wearable assistive robotic technology. He received his B. Eng with second class honours in Electrical Engineering from Chulalongkorn University in 2006. From 2009 until 2012, he pursued M. Sc. in Biomedical Engineering at RWTH Aachen, Germany, with the final topic related to medical imaging.
Besides academic area, after graduation in 2006, he worked in petrochemical industry with Rayong Engineering Public Company (REPCO) which is subsidiary of Siam Cement Group (SCG) Chemicals as an instrument and electrical maintenance engineer. In 2013 for a short period of time, he had a chance to be a research assistant in Knowledge Elicitation and Archiving laboratory (KEA) of National Electronics and Computer Technology (NECTEC) in Thailand working mainly on data mining and graph. Subsequently from 2014 until 2017, he moved entirely into business area by being selected to participate Engineering Graduate Program (EGP) of Siemens Healthcare Ltd., Thailand and later getting promoted to customer service business support manager.
Asst. Prof. Tulaya Limpiti
Department of Telecommunications Engineering, KMITL, Thailand
Keynote
Title:
AI-powered healthcare interventions for good health and well-being
Abstract:
The relevance of AI in all aspects of modern life is undeniable. One such aspect that has seen transformative impact from the AI advancement is the healthcare industry. This talk introduces different types of Machine Learning (ML) , a powerful subset of AI that allows systems to learn from data and drive autonomous decision-making, and how they can be applied to healthcare interventions for good health and well-being. Examples of past and existing projects from our research group exemplify its areas of impact, including self-care and preventive medicine, chronic care management, e-triage, and diagnostics, demonstrating how ML is fundamentally re-engineering the pathway to sustained wellness outcomes.
Biography:
Tulaya Limpiti received the BS degree with highest honors (Summa cum laude) from Northwestern University, Evanston, IL, in 2002 and the MS and PhD degrees from the University of Wisconsin–Madison, Madison, WI, in 2004 and 2008, respectively, all in Electrical Engineering. In 2008, she was a postdoctoral researcher at the University of Wisconsin–Madison. She is currently an assistant professor at the Faculty of Engineering, King Mongkut’s Institute of Technology Ladkrabang, Thailand. Her research interests include statistical signal processing, multidimensional signal representations, machine learning, and their applications in biomedicine, healthcare, and communication systems.
Assoc. Prof. Daniel Crespy
Director of School of Molecular Science and Engineering (MSE),
VISTEC, Thailand
Keynote
Title:
Preparation and function of responsive and self-healing materials
Abstract:
Responsive materials are materials significantly changing on demand one of their properties upon activation with an environmental stimulus such as a change of temperature or pH value, the presence of a chemical or electromagnetic waves. Herein, we discuss the preparation of these materials and several applications in advanced coatings or biomedicine. Furthermore, we discuss how to implement a self-healing property in polymers and its benefit beyond restoration of mechanical properties. Finally, we discuss the potential of these multifunctional materials for smart robotics.
Biography:
Daniel Crespy studied chemistry at the University of Strasbourg and completed his PhD under the supervision of Professor Katharina Landfester at the University of Ulm (Germany). In 2006, he became a project leader at Empa (Swiss Federal laboratories for Materials Research and Technology). He joined the department of Professor K. Landfester at the Max Planck Institute for Polymer Research (Mainz, Germany) in July 2009 as group leader. Daniel Crespy is now an Associate Professor in the Vidyasirimedhi Institute of Science and Technology (VISTEC) in Thailand. His current work is focused on responsive polymer materials for biomedicine, self-healing, and anticorrosion applications.
Dr. Ali Khaheshi
Mechanical Intelligence (MI) Research Group, London South Bank University, UK
Keynote
Title:
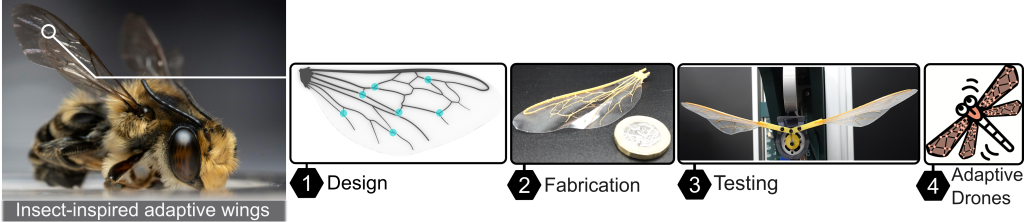
Mechanically Intelligent Bio-Inspired Drones for Safe Operations in Human-Centric Environments
Abstract:
Current aerial robotic systems are noisy, energy-intensive, and unsafe for deployment in human-centric environments such as emergency response zones, and indoor logistics. My research introduces a new class of mechanically intelligent insect-inspired drones that embed adaptability and robustness into their structural design. By integrating passive wing adaptability, advanced aeromechanics, and active neural control, these systems achieve ultra-quiet flight, high energy-efficiency, and collision-tolerance. Building upon my foundational work funded by the Royal Academy of Engineering Postdoctoral Fellowship, I will demonstrate how bio-inspired flapping-wing drones can deliver efficient and safe operations in complex environments—supporting applications in logistics, disaster-response, and environmental monitoring. This approach represents a paradigm shift in aerial robotics, where safety, sustainability, and adaptability are embedded directly into the design.
Biography:
Dr. Ali Khaheshi is a Royal Academy of Engineering Research Fellow leading a pioneering research program on insect-inspired flapping-wing drones at the Mechanical Intelligence Research Group at London South Bank University. His work focuses on developing ultra-efficient flapping-wing aerial robots through the integration of biomechanics, materials, robotics and control. His current work was selected as Top-Three Research Project of the year 2024 at LSBU Research & Innovation Festival.
His publications appear in leading journals such as PNAS and Advanced Science. He completed his PhD in just two years and has secured over £300k in funding as an early-career researcher. He has been endorsed by the Royal Academy of Engineering as “Exceptional Promise” under the Global Talent route. His work has been featured widely in media, including NDR TV, Phys.org, AZO Materials, Aljazeera.net, New Atlas, and 3D Printing Industry.


Dr. Richard Suphapol Diteesawat
Soft Robotics group at Bristol Robotics Laboratory (BRL), University of Bristol, UK
Keynote
Title:
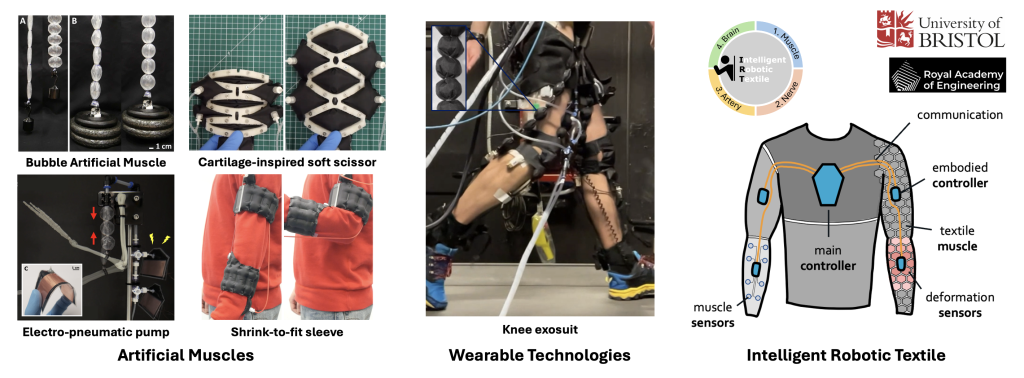
How Soft Robotics Can Shape the Future Generation of Wearable Assistive Technologies
Abstract:
Millions of people worldwide live with mobility impairments, highlighting the urgent need for healthcare solutions that restore independence and improve quality of life. To address this challenge, I have developed soft robotic artificial muscles that advance the capabilities of existing wearable assistive technologies. My work focuses on enabling natural motion assistance during daily activities, ensuring compliant and safe human-body interaction and achieving effective force transmission for prolonged, comfortable mobility support.
Building on fluidic artificial muscles and integrated compliant reinforcing structures, I have created a range of novel soft wearable exoskeletons for assistance, rehabilitation and body strength improvement. In parallel, my research explores smart materials and innovative robotic mechanisms, opening new pathways toward the next generation of intelligent robotic clothing.
Biography:
Dr. Richard Suphapol Diteesawat is an Assistant Professor at the University of Bristol, UK, specialising in soft robotic artificial muscles and medical assistive technologies. He was awarded a prestigious five-year Royal Academy of Engineering Research Fellowship, which he leads research on intelligent robotic textiles for next-generation assistive clothing. His current research focuses on high-power textile muscles, smart sensing and energy-harvesting textiles, and embedded intelligence in robotic garments to enable long-term, personalised mobility support.
He received a BEng in Mechanical Engineering from Chulalongkorn University, Thailand, and a PhD in Robotics and Autonomous Systems from the University of Bristol, UK. Over the past eight years, he has contributed extensively to healthcare-focused research stream, including the Right Trousers project (Research Associate, 2017-2018), the £1.5 million FREEHAB wearable rehabilitation project (Senior Research Associate, 2020-2024) and the £13.4 million VIVO Healthcare Technologies Hub for Enhanced Independent Living (Researcher Co-Investigator, 2024-2030) at Bristol Robotics Laboratory.
His research advances mobility rehabilitation for ageing populations and patients with physical disabilities and neurological injuries, including stroke, spinal cord, and brain trauma. He also works on human augmentation technologies for industrial and space applications, alongside innovation translation.

Dr. Shen Treratanakulchai
Department of Biomedical Engineering,
Mahidol University, Thailand
Keynote
Title:
Soft Robotic Teleoperation for Minimally Invasive Surgery
Abstract:
Colorectal cancer is the third most common cancer worldwide, and colonoscopy remains the gold standard for early screening. Yet, conventional colonoscopes often cause pain and discomfort, leading to lower screening uptake, while also requiring significant clinical expertise to master. These challenges highlight the urgent need for alternative approaches that improve both patient comfort and clinical usability.
In this talk, I will present my research on soft robotic systems for colonoscopy and minimally invasive surgery, beginning with my doctoral work on a teleoperated platform that integrates a novel orientation-locking master controller with a pneumatically actuated soft continuum manipulator and proprioceptive sensing skin. Finally, I will share ongoing work at Mahidol University and BARTLAB, where we are advancing soft robotic manipulators and surgical navigation systems supported by national and international collaborations.
The talk will outline both the engineering challenges—such as nonlinear stiffness, hysteresis, and control under uncertainty—and the clinical motivation driving this research: improving patient experience, enhancing accessibility, and empowering clinicians with new robotic tools for diagnosis and therapy.
Biography:
Dr. Shen Treratanakulchai is a Lecturer in the Department of Biomedical Engineering at Mahidol University and a Fellow at the Center for Biomedical and Robotics Technology (BARTLAB). He received his PhD in Mechanical Engineering from Imperial College London, where he developed soft robotic teleoperation systems for minimally invasive surgery. After completing his doctorate, he worked as a Research Associate at the Hamlyn Centre and the Mechatronics in Medicine Lab, Imperial College London, contributing to the EPSRC-funded ROBOGAST project, which focused on developing self-propelled soft robotic endoscopes for next-generation gastrointestinal surgery. His research interests include medical robotics, soft continuum manipulators, surgical navigation, and healthcare-focused robotic technologies. Over the years, Dr. Shen has contributed to projects ranging from rescue robotics to advanced surgical platforms, supported by both national and international research grants.
Dr. Thanate Angsuwatanakul
Faculty of Biomedical Engineering,
Rangsit University, Thailand
Keynote
Title:
Bridging Signal Processing and AI for Neuro-Innovation
Abstract:
In this talk, he will discuss how signal processing techniques can serve as the foundation for building robust data pipelines that support cutting-edge AI applications in biomedical engineering and neuro-technology.
Biography:
Dr. Thanate Angsuwatanakul, Head of the Bachelor of Engineering Program in Biomedical Engineering at Rangsit University, Thailand, earned his Ph.D. in Systems Life Sciences from Kyushu University, Japan. His work lies at the dynamic intersection of advanced signal processing and artificial intelligence (AI).
His core expertise focuses on neuroinformatics and the analysis of complex biomedical signals, particularly electroencephalography (EEG) and functional near-infrared spectroscopy (fNIRS). Dr. Angsuwatanakul is widely recognized for pioneering the integration of sophisticated AI models into neuroimaging and biosignal research. His publications include studies on Deep Fully-Convolutional Networks for neuroimaging data augmentation, Hierarchical Recurrent Neural Networks for decoding sensory expectations, and LSTM-based models for EEG-driven motor imagery classification. He has also made significant contributions to advancing the use of Multiscale Entropy as a key analytical feature in fNIRS studies.
Beyond academia, Dr. Angsuwatanakul brings innovation into practical applications. He has developed a Brain–Computer Interface (BCI) game demo and received a startup award for his “Music Therapy” project. His ongoing research interests span medical signal and image processing, as well as BCI development.
Dr. Pongtorn Kietdumrongwong
Director of BDMS Health Research Center,
BDMS, Thailand
Special talk
Title:
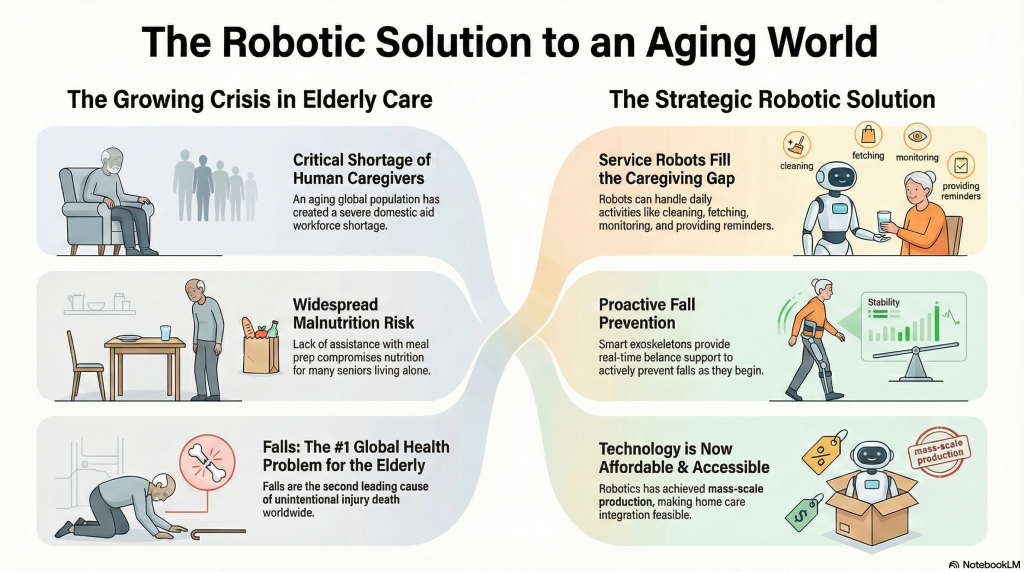
Robotics Technology: The Strategic Imperative for Longevity in an Aging World
Abstract:
The global demographic shift toward an aging population presents a critical challenge to national healthcare and social support systems. The traditional human-centric care model is failing due to a severe domestic aid workforce shortage. The direct consequences of aging society—specifically the high incidence of malnutrition and the catastrophic risk of falls—necessitate an urgent technological intervention. In this talk, I will discuss how the strategic deployment of commercially viable and increasingly affordable robotics technology offers a proven, scalable solution to mitigate these risks, secure independence, and foster genuine longevity.
Biography:
Pongtorn Kietdumrongwong, M.D. holds Doctor of Medicine, Faculty of Medicine, Ramathibodi Hospital, Mahidol University, Thailand and obtained his Certification in Surgery from Prince of Songkla University, Thailand and Certificate in Critical Care Medicine and Emergency Medicine from Chulalongkorn University, Thailand. He also gained experiences in various aspects of healthcare management, from facility management, project management, business development and process improvement. His backbone work is quality improvement and change management. Currently, Dr.Pongtorn serves as BDMS Health Research Center Director and Project Management Director at Bangkok Dusit Medical Services Plc. (BDMS) and also serves as ISQua EEA Surveyor and JCI Surveyor.
Assoc. Prof. Theerawit Wilaiprasitporn
BRAIN-Interfaces Lab, IST,
VISTEC, Thailand
Special talk
Title:
Scaling Data-Driven Digital Therapeutics for NCD Prevention: Thailand’s Personalized Platform for Obesity Prevention and Care
Abstract:
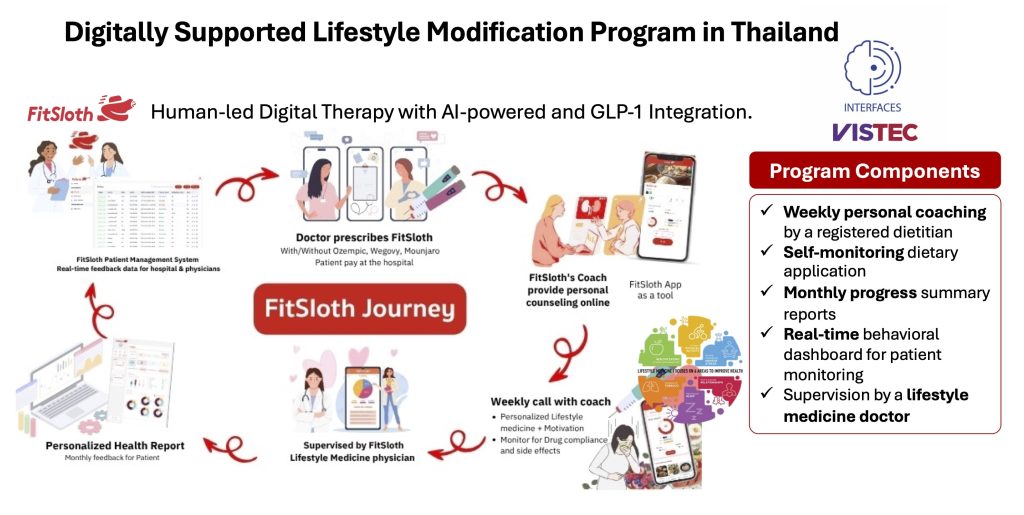
This keynote presents a collaboration between the Interfaces research team at VISTEC and FitSloth, showcasing FitSloth as Thailand’s first clinically adopted digital therapeutic (DTx) platform for obesity prevention and care. The platform leverages real-world behavioral data to deliver scalable, personalized interventions across clinical and population settings. Ongoing randomized controlled trials with medical schools are evaluating digital therapy against face-to-face care. In parallel, FitSloth is being deployed through public-sector obesity prevention programs in Bangkok in collaboration with the National Health Security Office (NHSO), and integrated into clinical pathways for patients receiving GLP-1 therapies in partnership with a leading global pharmaceutical company, demonstrating how evidence-based DTx can strengthen Thailand’s NCD prevention and care model, extend workforce capacity, improve access and equity, and build a pragmatic foundation for the long-term sustainability of the Universal Health Coverage (UHC) system.
Biography:
Theerawit Wilaiprasitporn received his Ph.D. in Engineering from the Graduate School of Information Science and Engineering at the Tokyo Institute of Technology, Japan, in 2017. He specializes in AI applications for health and medical purposes. He founded Interfaces, an AI-driven health research team at the Vidyasirimedhi Institute of Science and Technology (VISTEC) in Thailand.
Since establishing Interfaces at VISTEC in 2019, Theerawit’s contributions have been instrumental in developing remote health monitoring systems, which supported over 30,000 individuals during the COVID-19 pandemic. This achievement led to his nomination for the 2022 IEEE R10 Humanitarian Technology Activities Outstanding Volunteer Award. Most recently, he was honored with the prestigious Young Scientist Award 2024 by the Foundation for the Promotion of Science and Technology under the Patronage of His Majesty the King, recognizing him as one of Thailand’s leading young professionals. He was subsequently awarded the Outstanding Research Award 2025 from the National Research Council of Thailand (NRCT) for his long-term work (2019–2025) on advancing multi-task and multi-objective AI architectures for EEG and PPG signal processing.
Theerawit served as an Associate Editor for the IEEE Internet of Things Journal and the IEEE Sensors Journal for four years before his resignation. Since 2025, he has been involved in Thailand’s first digital therapeutic service, FitSloth.
Asst. Prof. Supasorn Suwajanakorn
Vision & Learning Lab, IST,
VISTEC, Thailand
Special talk
Title:
Generation Is a Side Effect
Abstract:
Image and video models are built to generate—but generation is only the tip of the iceberg. I will show how modern generative models can be turned into visual reasoning engines, uncovering geometry, correspondence, segmentation, and physical relationships they were never trained to model. These capabilities point toward a new role for generative models in physical AI and robotics. I will also briefly introduce our lab and its broader research agenda in this space.
Biography:
Supasorn Suwajanakorn is an assistant professor at VISTEC, Thailand, working at the intersection of computer vision, deep learning, and graphics. Previously, he was a Research Resident at Google AI. His Ph.D. thesis at the University of Washington won the Innovation of the Year Award (2016), the William Chan Memorial Dissertation Award, and was presented at TED in Vancouver in 2017. His Vision & Learning Lab has published multiple oral papers at top A* conferences, where he has also served as an area chair.
